Burgers Equation PINN¶
| Metadata | Value |
|---|---|
| Level | Intermediate |
| Runtime | ~3 min (GPU) / ~10 min (CPU) |
| Prerequisites | JAX, Flax NNX, calculus basics |
| Format | Python + Jupyter |
| Memory | ~500 MB RAM |
Overview¶
This tutorial demonstrates solving the 1D viscous Burgers equation using a Physics-Informed Neural Network (PINN). The Burgers equation is a fundamental nonlinear PDE that serves as a simplified model for fluid dynamics and shock wave formation.
The Burgers equation combines nonlinear advection with viscous diffusion, making it an important testbed for numerical methods. PINNs can capture sharp gradients and shock-like behavior without explicit shock-capturing schemes required by traditional methods.
What You'll Learn¶
- Implement a PINN for time-dependent nonlinear PDEs
- Sample collocation points for domain, boundary, and initial conditions
- Compute gradients using JAX autodiff (first and second derivatives)
- Balance PDE residual, IC, and BC losses with appropriate weights
- Visualize spatiotemporal solutions and solution evolution
Coming from DeepXDE?¶
If you are familiar with the DeepXDE library:
| DeepXDE | Opifex (JAX) |
|---|---|
dde.geometry.GeometryXTime(geom, timedomain) |
jax.random.uniform(key, (N, 2)) for (x, t) |
dde.grad.jacobian(y, x, i=0, j=1) |
jax.grad(u_fn, argnums=1)(x, t) for u_t |
dde.icbc.IC(geom, func, lambda_fun) |
Manual initial condition sampling + loss term |
dde.icbc.DirichletBC(geom, func, boundary) |
Manual boundary sampling + loss term |
dde.data.TimePDE(geom, pde, ic, bc, num_domain) |
Explicit collocation arrays |
model.compile("adam", lr=1e-3) |
nnx.Optimizer(pinn, optax.adam(lr), wrt=nnx.Param) |
model.train(iterations=15000) |
Custom training loop with @nnx.jit |
Key differences:
- Pure JAX autodiff: Use
jax.graddirectly instead of custom gradient APIs - Explicit collocation: Collocation points are simple JAX arrays
- Separate IC/BC sampling: Initial and boundary conditions are sampled separately
- JIT compilation: Entire training step is XLA-compiled for GPU acceleration
Files¶
- Python Script:
examples/pinns/burgers.py - Jupyter Notebook:
examples/pinns/burgers.ipynb
Quick Start¶
Run the Python Script¶
Run the Jupyter Notebook¶
Core Concepts¶
Burgers Equation¶
The 1D viscous Burgers equation is a nonlinear parabolic PDE:
where \(\nu\) is the kinematic viscosity (diffusion coefficient).
| Component | This Example |
|---|---|
| Domain | \(x \in [-1, 1]\), \(t \in [0, 0.99]\) |
| Viscosity | \(\nu = 0.01/\pi \approx 0.003183\) |
| Initial condition | \(u(x, 0) = -\sin(\pi x)\) |
| Boundary conditions | \(u(\pm 1, t) = 0\) (Dirichlet) |
Physical Interpretation¶
The Burgers equation models:
- Nonlinear advection (\(u \cdot u_x\)): Wave steepening and shock formation
- Viscous diffusion (\(\nu \cdot u_{xx}\)): Smoothing that prevents discontinuities
At low viscosity, the solution develops steep gradients. This example uses moderate viscosity where the solution remains smooth but shows characteristic nonlinear behavior.
PINN Loss Components¶
graph TB
subgraph Input["Collocation Points"]
A["Domain Points<br/>(x, t) in Ω"]
B["Initial Points<br/>(x, 0)"]
C["Boundary Points<br/>(±1, t)"]
end
subgraph PINN["Neural Network u_θ(x, t)"]
D["Linear + tanh<br/>20 units"]
E["Linear + tanh<br/>20 units"]
F["Linear + tanh<br/>20 units"]
G["Linear<br/>1 unit"]
end
subgraph Loss["Physics-Informed Loss"]
H["PDE Residual<br/>|u_t + u·u_x - ν·u_xx|²"]
I["IC Loss<br/>|u(x,0) - u₀(x)|²"]
J["BC Loss<br/>|u(±1,t)|²"]
K["Total Loss<br/>L_pde + λ_ic·L_ic + λ_bc·L_bc"]
end
A --> D --> E --> F --> G --> H
B --> D
C --> D
G --> I
G --> J
H --> K
I --> K
J --> K
style H fill:#e3f2fd,stroke:#1976d2
style I fill:#e8f5e9,stroke:#388e3c
style J fill:#fff3e0,stroke:#f57c00
style K fill:#f3e5f5,stroke:#7b1fa2Computing Derivatives¶
The PDE residual requires first and second derivatives:
def compute_pde_residual(pinn, x, t):
def u_fn(x_single, t_single):
xt = jnp.array([x_single, t_single])
return pinn(xt.reshape(1, 2)).squeeze()
def residual_single(x_single, t_single):
# First derivatives
u = u_fn(x_single, t_single)
u_t = jax.grad(u_fn, argnums=1)(x_single, t_single)
u_x = jax.grad(u_fn, argnums=0)(x_single, t_single)
# Second derivative
u_xx = jax.grad(lambda x: jax.grad(u_fn, argnums=0)(x, t_single))(x_single)
# Burgers: u_t + u*u_x - nu*u_xx = 0
return u_t + u * u_x - NU * u_xx
return jax.vmap(residual_single)(x, t)
Implementation¶
Step 1: Imports and Configuration¶
Terminal Output:
======================================================================
Opifex Example: Burgers Equation PINN
======================================================================
JAX backend: gpu
JAX devices: [CudaDevice(id=0)]
Domain: x ∈ [-1.0, 1.0], t ∈ [0.0, 0.99]
Viscosity: nu = 0.003183
Collocation: 2540 domain, 80 boundary, 160 initial
Network: [2] + [20, 20, 20] + [1]
Training: 15000 epochs @ lr=0.001
Step 2: Define the Problem¶
# DeepXDE configuration
NU = 0.01 / jnp.pi # Viscosity
X_MIN, X_MAX = -1.0, 1.0
T_MIN, T_MAX = 0.0, 0.99
# Collocation points (matching DeepXDE)
N_DOMAIN = 2540
N_BOUNDARY = 80
N_INITIAL = 160
def initial_condition(x):
"""Initial condition: u(x, 0) = -sin(πx)."""
return -jnp.sin(jnp.pi * x)
Terminal Output:
Burgers equation: du/dt + u*du/dx = nu*d2u/dx2
Initial condition: u(x, 0) = -sin(πx)
Boundary conditions: u(±1, t) = 0
Step 3: Create the PINN¶
class BurgersPINN(nnx.Module):
def __init__(self, hidden_dims: list[int], *, rngs: nnx.Rngs):
layers = []
in_features = 2 # (x, t)
for hidden_dim in hidden_dims:
layers.append(nnx.Linear(in_features, hidden_dim, rngs=rngs))
in_features = hidden_dim
layers.append(nnx.Linear(in_features, 1, rngs=rngs))
self.layers = nnx.List(layers)
def __call__(self, xt: jax.Array) -> jax.Array:
h = xt
for layer in self.layers[:-1]:
h = jnp.tanh(layer(h))
return self.layers[-1](h)
pinn = BurgersPINN(hidden_dims=[20, 20, 20], rngs=nnx.Rngs(42))
Terminal Output:
Step 4: Generate Collocation Points¶
# Domain points (interior)
x_domain = jax.random.uniform(key1, (N_DOMAIN,), minval=X_MIN, maxval=X_MAX)
t_domain = jax.random.uniform(key2, (N_DOMAIN,), minval=T_MIN, maxval=T_MAX)
# Initial condition points (t = 0)
x_initial = jax.random.uniform(key3, (N_INITIAL,), minval=X_MIN, maxval=X_MAX)
t_initial = jnp.zeros(N_INITIAL)
# Boundary points (x = ±1)
t_boundary = jax.random.uniform(key4, (N_BOUNDARY,), minval=T_MIN, maxval=T_MAX)
x_boundary_left = jnp.full(N_BOUNDARY // 2, X_MIN)
x_boundary_right = jnp.full(N_BOUNDARY // 2, X_MAX)
Terminal Output:
Generating collocation points...
Domain points: (2540, 2)
Boundary points: (80, 2)
Initial points: (160, 2)
Step 5: Training¶
Terminal Output:
Training PINN...
Epoch 1/15000: loss=1.109028e+00
Epoch 3000/15000: loss=7.919201e-02
Epoch 6000/15000: loss=1.014442e-02
Epoch 9000/15000: loss=5.904152e-03
Epoch 12000/15000: loss=3.557441e-03
Epoch 15000/15000: loss=2.660285e-03
Final loss: 2.660285e-03
Step 6: Evaluation¶
Terminal Output:
Evaluating PINN...
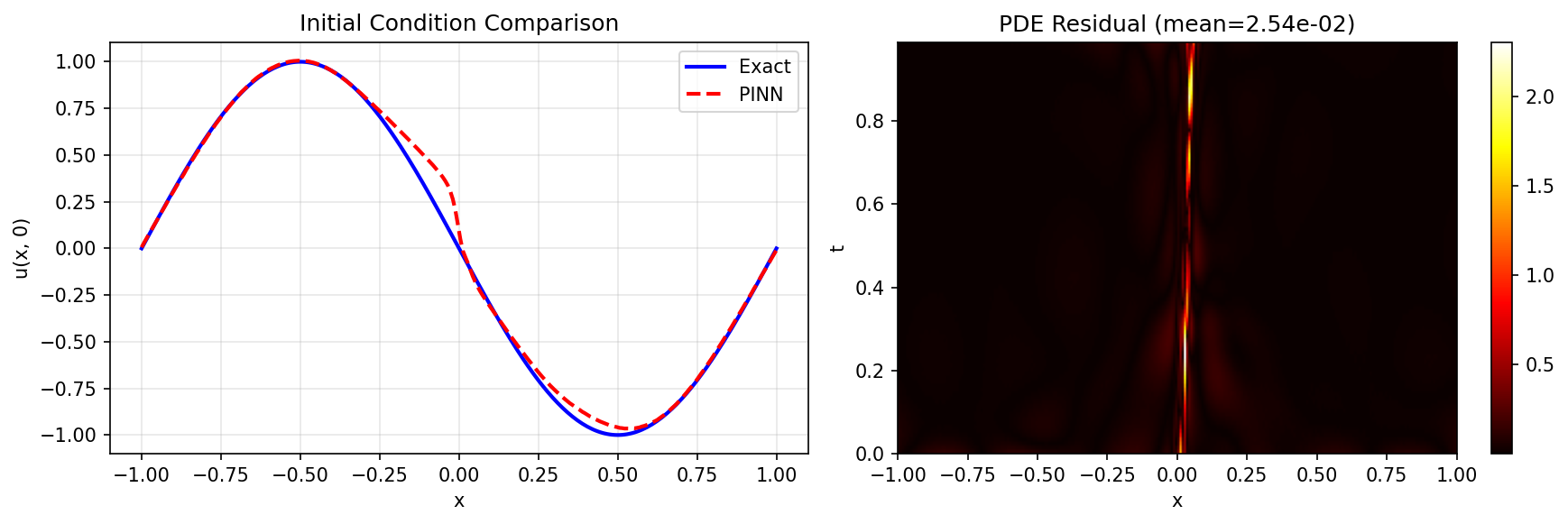
Mean PDE residual: 2.539036e-02
Initial condition error: 3.055971e-02
Boundary condition error: 2.018995e-03
Visualization¶
Solution Evolution¶
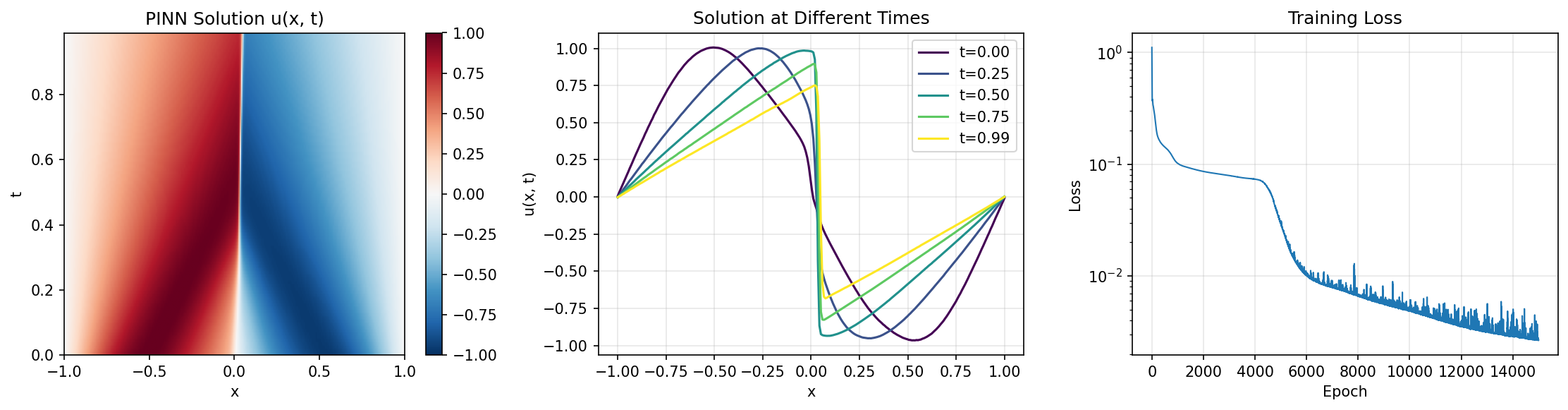
Analysis¶
Results Summary¶
| Metric | Value |
|---|---|
| Final Loss | 2.66e-03 |
| Mean PDE Residual | 2.54e-02 |
| IC Error | 3.06e-02 |
| BC Error | 2.02e-03 |
| Parameters | 921 |
| Training Epochs | 15,000 |
Next Steps¶
Experiments to Try¶
- Higher viscosity: Try \(\nu = 0.1/\pi\) for smoother solutions
- Lower viscosity: Try \(\nu = 0.001/\pi\) to see steeper gradients
- Larger network: Use
hidden_dims=[40, 40, 40, 40]for higher accuracy - More epochs: Train for 30,000+ epochs for better convergence
- Adaptive weights: Implement loss balancing for IC/BC terms
Related Examples¶
| Example | Level | What You'll Learn |
|---|---|---|
| Poisson Equation | Intermediate | Elliptic PDEs |
| Heat Equation | Intermediate | Simpler time-dependent PDE |
| FNO on Burgers | Intermediate | Data-driven alternative |
| PINO on Burgers | Advanced | Hybrid approach |
API Reference¶
nnx.Linear- Linear layernnx.Optimizer- Optimizer wrapperjax.grad- Gradient computationjax.vmap- Vectorized mapping
Troubleshooting¶
Loss oscillates or diverges¶
Symptom: Training loss fluctuates wildly or increases.
Cause: Learning rate too high or poorly balanced loss terms.
Solution: Reduce learning rate or adjust loss weights:
# Lower learning rate
LEARNING_RATE = 5e-4
# Adjust loss weights
lambda_ic = 100.0 # Increase if IC not satisfied
lambda_bc = 100.0 # Increase if BCs not satisfied
Solution blows up at later times¶
Symptom: Solution looks good near t=0 but becomes incorrect at larger t.
Cause: Insufficient domain collocation points in later time region.
Solution: Use more domain points or time-stratified sampling:
# Stratified sampling in time
t_bins = jnp.linspace(T_MIN, T_MAX, 10)
points_per_bin = N_DOMAIN // 9
t_domain = jnp.concatenate([
jax.random.uniform(key, (points_per_bin,), minval=t_bins[i], maxval=t_bins[i+1])
for i, key in enumerate(jax.random.split(key, 9))
])
IC error much higher than PDE residual¶
Symptom: Initial condition has large error compared to PDE residual.
Cause: Network prioritizes minimizing PDE over satisfying IC.
Solution: Increase IC loss weight or use hard constraint:
# Hard BC/IC constraint (recommended)
def hard_constraint(pinn, xt):
x, t = xt[:, 0], xt[:, 1]
u_nn = pinn(xt).squeeze()
# Multiply by t to enforce u(x,0) = 0, add IC
return u_nn * t + (1 - t) * initial_condition(x)
Slow convergence¶
Symptom: Need many epochs (>50,000) to converge.
Cause: Network architecture not suited for solution structure.
Solution: Use tanh activation (smooth), deeper network, or Fourier features:
# Fourier feature encoding
def fourier_features(xt, scales=[1, 2, 4, 8]):
features = [xt]
for s in scales:
features.append(jnp.sin(s * jnp.pi * xt))
features.append(jnp.cos(s * jnp.pi * xt))
return jnp.concatenate(features, axis=-1)
Comparison with DeepXDE¶
Both frameworks solve the same Burgers equation with identical network size ([2, 20, 20, 20, 1]) and training configuration (2540 domain points, 80 boundary, 160 initial condition points, 15000 Adam iterations).
Results from running on the same hardware:
| Metric | Opifex (JAX) | DeepXDE (TensorFlow) |
|---|---|---|
| Final loss | 2.66e-3 | 5.80e-3 |
| Mean PDE residual | 2.54e-2 | 3.23e-2 |
| L2 relative error | -- | 0.291 |
| BC error | 2.02e-3 | -- |
| Parameters | 921 | 921 |
Opifex achieves lower final loss (2.66e-3 vs 5.80e-3) and lower PDE residual (2.54e-2 vs 3.23e-2) with the same architecture and training budget.
Opifex advantages: JIT-compiled training loop, explicit PRNG control,
composable JAX transforms (jax.grad, jax.vmap), hard constraint support.