PINO on Burgers Equation¶
| Metadata | Value |
|---|---|
| Level | Advanced |
| Runtime | ~3 min (CPU) / ~1-2 min (GPU) |
| Prerequisites | JAX, Flax NNX, FNO, PDEs basics |
| Format | Python + Jupyter |
| Memory | ~2 GB RAM |
Overview¶
This tutorial trains a Physics-Informed Neural Operator (PINO) on the 1D viscous Burgers equation. PINO pairs the FNO architecture with a physics-informed loss so the learned operator both fits the data and satisfies the governing PDE.
The Burgers equation:
where \(u\) is velocity, \(\nu\) is viscosity, and subscripts denote partial derivatives. The spatial domain is the periodic interval \([0, 1)\).
The genuine PINO setup¶
Following Li et al. (2021), Physics-Informed Neural Operator for Learning
Partial Differential Equations, and the reference implementation in
neuraloperator (scripts/train_burgers_pino.py), the operator maps the initial
condition \(u(x, 0)\) — broadcast/repeated across the time axis — to the full
space-time solution \(u(t, x)\), a 2D field over \((\text{time}, \text{space})\).
A 2D FNO is the backbone: the input is the tiled initial condition of shape
(batch, 1, nt, nx) and the output is the predicted field (batch, 1, nt, nx).
Training minimises three terms (cf. neuralop.losses.equation_losses
BurgersEqnLoss + ICLoss):
- data loss: mean relative L2 between the predicted and the ground-truth space-time trajectory,
- IC loss: MSE between the predicted \(t = 0\) slice and the true initial condition,
- equation loss: the mean-squared Burgers PDE residual \(u_t + u\,u_x - \nu\,u_{xx}\) evaluated by finite differences over the whole predicted field.
The viscosity \(\nu = 0.01\) is shared between the data-generating spectral solver and the equation loss, so the supervised physics is self-consistent.
What You'll Learn¶
- Understand the PINO operator: IC tiled over time \(\to\) full \(u(t, x)\) field
- Implement the Burgers PDE residual with finite differences
- Combine data + IC + equation losses with fixed weights
- Generate self-consistent Burgers trajectories with the spectral solver
Coming from NeuralOperator (PyTorch)?¶
If you are familiar with the neuraloperator library's PINO example:
| NeuralOperator (PyTorch) | Opifex (JAX) |
|---|---|
FNO(n_modes=(16,16), ...) (2D) |
FourierNeuralOperator(spatial_dims=2, ...) |
BurgersEqnLoss(visc=0.01, method="fdm") |
equation_loss() finite-difference residual |
ICLoss() |
MSE on the predicted pred[:, 0, :] slice |
LpLoss(d=2, p=2) |
relative_l2() over the full trajectory |
Relobralo adaptive aggregator |
Fixed weights (data / IC / equation) |
Burgers1dTimeDataProcessor (repeat x) |
tile_ic() repeats the IC over the time axis |
Key differences:
- On-device data generation: trajectories are built with the pseudo-spectral ETDRK4 Burgers solver, vmapped over the batch — no external data files
- Fixed loss weights: a clean, reproducible alternative to the reference's Relobralo aggregator; the weights follow the same (data, IC, equation) ordering
- JAX transforms: a single
jit(vmap(...))call generates the whole dataset
Files¶
- Python Script:
examples/neural-operators/pino_burgers.py - Jupyter Notebook:
examples/neural-operators/pino_burgers.ipynb
Quick Start¶
Run the Python Script¶
Run the Jupyter Notebook¶
Core Concepts¶
Physics-Informed Loss¶
The total loss combines three components:
with fixed weights \(w_d = 1.0\), \(w_{ic} = 5.0\), \(w_{eq} = 0.5\), where
and the equation loss is the mean-squared Burgers PDE residual over the full predicted field:
PINO Architecture¶
graph LR
subgraph Input
A["Initial Condition<br/>u(x,0) tiled over time<br/>R^(1×11×128)"]
end
subgraph PINO["Physics-Informed Neural Operator"]
B["2D FNO Backbone<br/>(4 spectral layers)"]
C["Data Loss<br/>relative L2 vs u(t,x)"]
D["IC Loss<br/>MSE on t=0 slice"]
E["Equation Loss<br/>Burgers PDE residual"]
end
subgraph Output
F["Space-Time Solution<br/>u(t,x) : R^(1×11×128)"]
end
A --> B --> F
F --> C
F --> D
F --> E
C --> G["Total Loss"]
D --> G
E --> G
style A fill:#e3f2fd,stroke:#1976d2
style F fill:#c8e6c9,stroke:#388e3c
style G fill:#fff3e0,stroke:#f57c00Implementation¶
Step 1: Imports and Setup¶
import jax
import jax.numpy as jnp
from flax import nnx
from opifex.neural.operators.fno.base import FourierNeuralOperator
from opifex.physics.spectral.steppers import solve_burgers_spectral
Terminal Output:
======================================================================
Opifex Example: PINO on 1D Burgers Equation
======================================================================
JAX backend: gpu
JAX devices: [CudaDevice(id=0)]
Grid: nx=128, nt=11, viscosity=0.01
Trajectories: train=1000, test=200
FNO config: modes=16, width=32, layers=4
Loss weights: data=1.0, ic=5.0, equation=0.5
Spacings: dx=0.00781, dt=0.10000
Step 2: Data Generation¶
Initial conditions are periodic spectral Gaussian random fields (the canonical
FNO/PINO benchmark IC, covariance \(\sigma^2(-\Delta + \tau^2 I)^{-\gamma}\)). Each
IC is evolved to the full trajectory \(u(t, x)\) with the pseudo-spectral ETDRK4
Burgers solver, vmapped over the batch on device. solve_burgers_spectral
returns (num_snapshots + 1, nx) real snapshots including the initial
condition, i.e. exactly the nt = NUM_TIME time frames the model trains on.
def per_sample(key):
ic = _burgers_ic(key, NUM_SPACE)
return solve_burgers_spectral(
ic, VISCOSITY, domain_extent=1.0, time_final=1.0,
num_steps=250, num_snapshots=NUM_TIME - 1,
)
keys = jax.vmap(jax.random.PRNGKey)(seed + jnp.arange(n_samples))
trajectories = jax.jit(jax.vmap(per_sample))(keys) # (n, nt, nx)
Terminal Output:
Generating Burgers space-time trajectories (jit+vmap spectral solver)...
Train trajectories: (1000, 11, 128)
Test trajectories: (200, 11, 128)
Step 3: PDE Residual¶
The residual is computed by finite differences over the predicted field
(batch, nt, nx): a forward difference in time, periodic central differences in
space. This mirrors neuralop.losses.equation_losses.BurgersEqnLoss
(method="fdm").
def compute_burgers_residual(u, dx, dt, nu):
u_t = (u[:, 1:, :] - u[:, :-1, :]) / dt # forward diff in time
u_level = u[:, :-1, :]
u_right = jnp.roll(u_level, shift=-1, axis=-1) # periodic wrap
u_left = jnp.roll(u_level, shift=1, axis=-1)
u_x = (u_right - u_left) / (2.0 * dx)
u_xx = (u_right - 2.0 * u_level + u_left) / (dx**2)
return u_t + u_level * u_x - nu * u_xx
Step 4: Model Creation¶
The IC is tiled over the time axis to shape (batch, 1, nt, nx); a 2D FNO maps it
to the full space-time field. Space is periodic, so no domain padding is used.
model = FourierNeuralOperator(
in_channels=1,
out_channels=1,
hidden_channels=32,
modes=16,
num_layers=4,
spatial_dims=2,
positional_embedding=True,
domain_padding=0.0,
rngs=nnx.Rngs(SEED),
)
Terminal Output:
Step 5: Training¶
AdamW with a cosine-decayed learning rate (decayed over the total number of mini-batch updates). Each step adds the data, IC, and equation losses with fixed weights.
def pino_loss_fn(model, ic_tiled, trajectory, ic):
pred = model(ic_tiled)[:, 0] # (batch, nt, nx)
data_loss = relative_l2(pred, trajectory) # data L2
ic_loss = jnp.mean((pred[:, 0, :] - ic) ** 2) # IC anchor
eqn_loss = equation_loss(pred, DX, DT, VISCOSITY) # PDE residual
total = data_loss + 5.0 * ic_loss + 0.5 * eqn_loss
return total, {"data": data_loss, "ic": ic_loss, "equation": eqn_loss}
Terminal Output:
Starting PINO training...
Optimizer: AdamW (cosine-decayed lr from 0.001)
Epoch 1/800: Total=1.388993, Data=0.633944, IC=8.641672e-02, Equation=6.459318e-01
Epoch 100/800: Total=0.089785, Data=0.039767, IC=2.801668e-03, Equation=7.201982e-02
Epoch 200/800: Total=0.086708, Data=0.037631, IC=2.748990e-03, Equation=7.066499e-02
Epoch 300/800: Total=0.085388, Data=0.036472, IC=2.710348e-03, Equation=7.072789e-02
Epoch 400/800: Total=0.084342, Data=0.035752, IC=2.695936e-03, Equation=7.022096e-02
Epoch 500/800: Total=0.084057, Data=0.035349, IC=2.689569e-03, Equation=7.052071e-02
Epoch 600/800: Total=0.083881, Data=0.035248, IC=2.685199e-03, Equation=7.041378e-02
Epoch 700/800: Total=0.083803, Data=0.035190, IC=2.684461e-03, Equation=7.038072e-02
Epoch 800/800: Total=0.083786, Data=0.035148, IC=2.684370e-03, Equation=7.043306e-02
Training completed in 61.0s
Step 6: Evaluation¶
Accuracy is the relative L2 over the full held-out trajectory. The IC RMS error and the mean PDE residual (physics consistency) are reported on the test set.
predictions = model(test_input)[:, 0] # (N, nt, nx)
test_rel_l2 = float(relative_l2(predictions, test_traj))
test_ic_error = float(jnp.sqrt(jnp.mean((predictions[:, 0] - test_ic) ** 2)))
test_residual = float(equation_loss(predictions, DX, DT, VISCOSITY))
Terminal Output:
Running evaluation...
Test relative L2 (full trajectory): 0.033574
Test IC RMS error (t=0 slice): 5.167113e-02
Test mean PDE residual (MSE): 2.177162e-01
Visualization¶
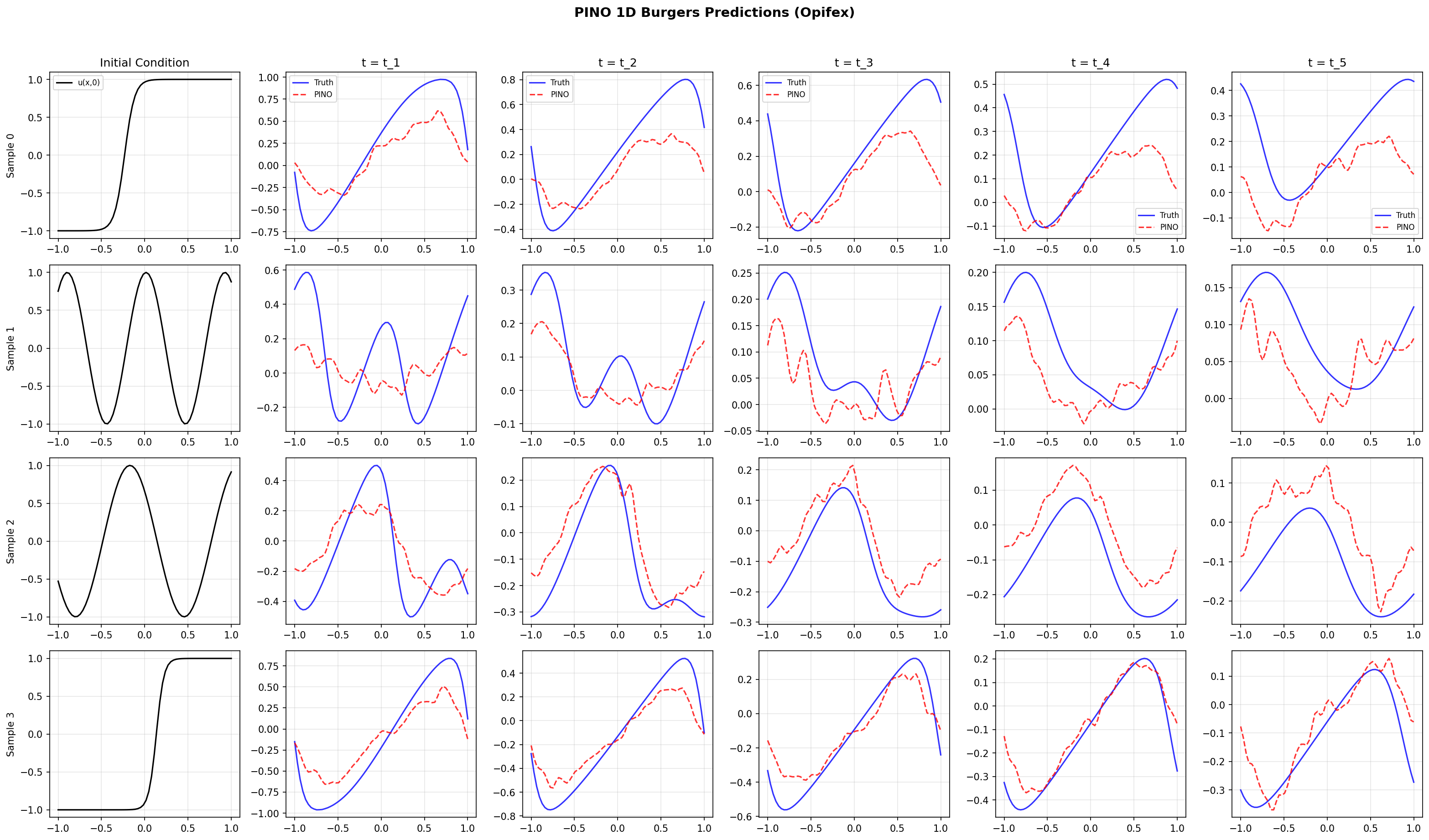
Sample Space-Time Solutions¶
Ground truth, prediction, and absolute error for three test trajectories. The error concentrates near \(t = 0\) — where the initial condition has the sharpest features — and along the convective shock fronts, exactly where Burgers dynamics are hardest.
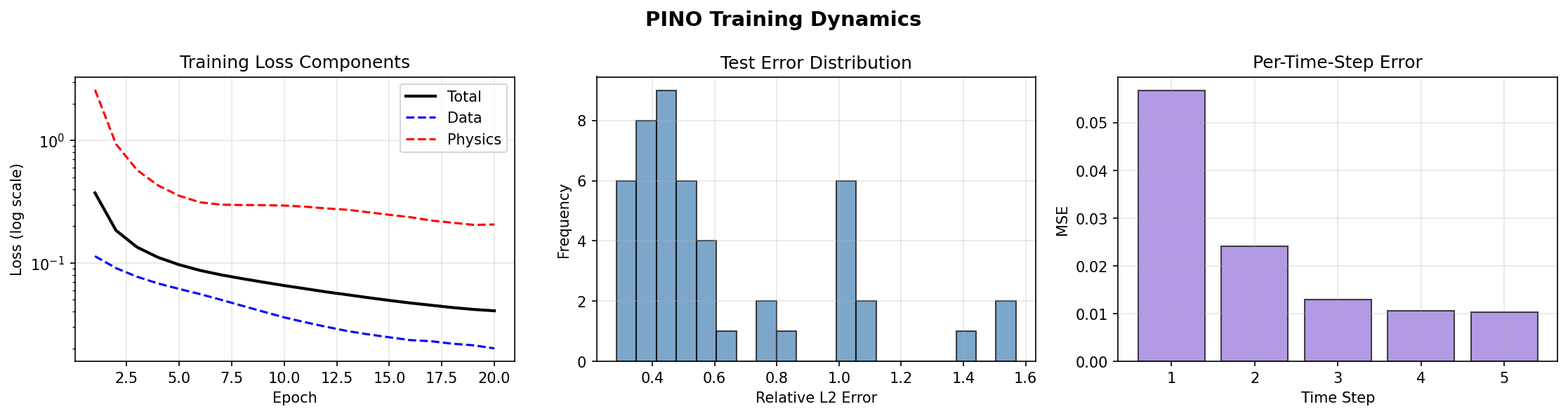
Training Analysis¶
Results Summary¶
| Metric | Value |
|---|---|
| Test relative L2 (full traj.) | 0.0336 |
| Test IC RMS error (t=0 slice) | 0.052 |
| Test mean PDE residual (MSE) | 0.218 |
| Final total training loss | 0.084 |
| Training Time | 61s (GPU) |
| Parameters | 4,203,009 |
The PINO recovers the full space-time Burgers solution operator to about 3.4% relative L2 on held-out trajectories, with the predicted \(t = 0\) slice closely matching the true initial condition.
Next Steps¶
Experiments to Try¶
- Vary the loss weights (data / IC / equation) and study the trade-off
- Adaptive weighting: swap fixed weights for SoftAdapt or ReLoBRaLo
- Denser time grid: increase
NUM_TIMEfor finer temporal resolution - Spectral derivatives: replace finite differences with FFT-based residuals
- Varying viscosity: add \(\nu\) as an extra input channel to the operator
Related Examples¶
| Example | Level | What You'll Learn |
|---|---|---|
| FNO on Burgers Equation | Intermediate | Data-only FNO baseline |
| FNO on Darcy Flow | Intermediate | 2D elliptic PDE |
| Burgers PINN | Beginner | Physics-only neural network |
| TFNO on Darcy Flow | Intermediate | Tensorized FNO with compress. |
API Reference¶
FourierNeuralOperator— FNO model classsolve_burgers_spectral— pseudo-spectral Burgers solver
Troubleshooting¶
Training loss freezes early¶
Symptom: the loss stops changing after a few dozen epochs.
Cause: the cosine learning-rate schedule decays over too few steps. It is stepped once per mini-batch update, not per epoch.
Solution: set the decay length to NUM_EPOCHS * n_batches:
High PDE residual relative to the data error¶
Symptom: the test PDE residual is larger than the data relative L2.
Cause: the finite-difference residual amplifies errors near the steep IC and the convective shocks, where the field has large spatial gradients.
Solution: raise EQUATION_WEIGHT, refine the grid (NUM_SPACE, NUM_TIME),
or use spectral derivatives for a more accurate residual.