FBPINN: Finite Basis PINN on Damped Harmonic Oscillator¶
Filename Note
The filename fbpinn-poisson is a historical artifact. This example solves a
damped harmonic oscillator ODE, not the Poisson equation.
| Metadata | Value |
|---|---|
| Level | Intermediate |
| Runtime | ~2 min (GPU) / ~10 min (CPU) |
| Prerequisites | JAX, Flax NNX, ODEs |
| Format | Python + Jupyter |
| Memory | ~300 MB RAM |
Overview¶
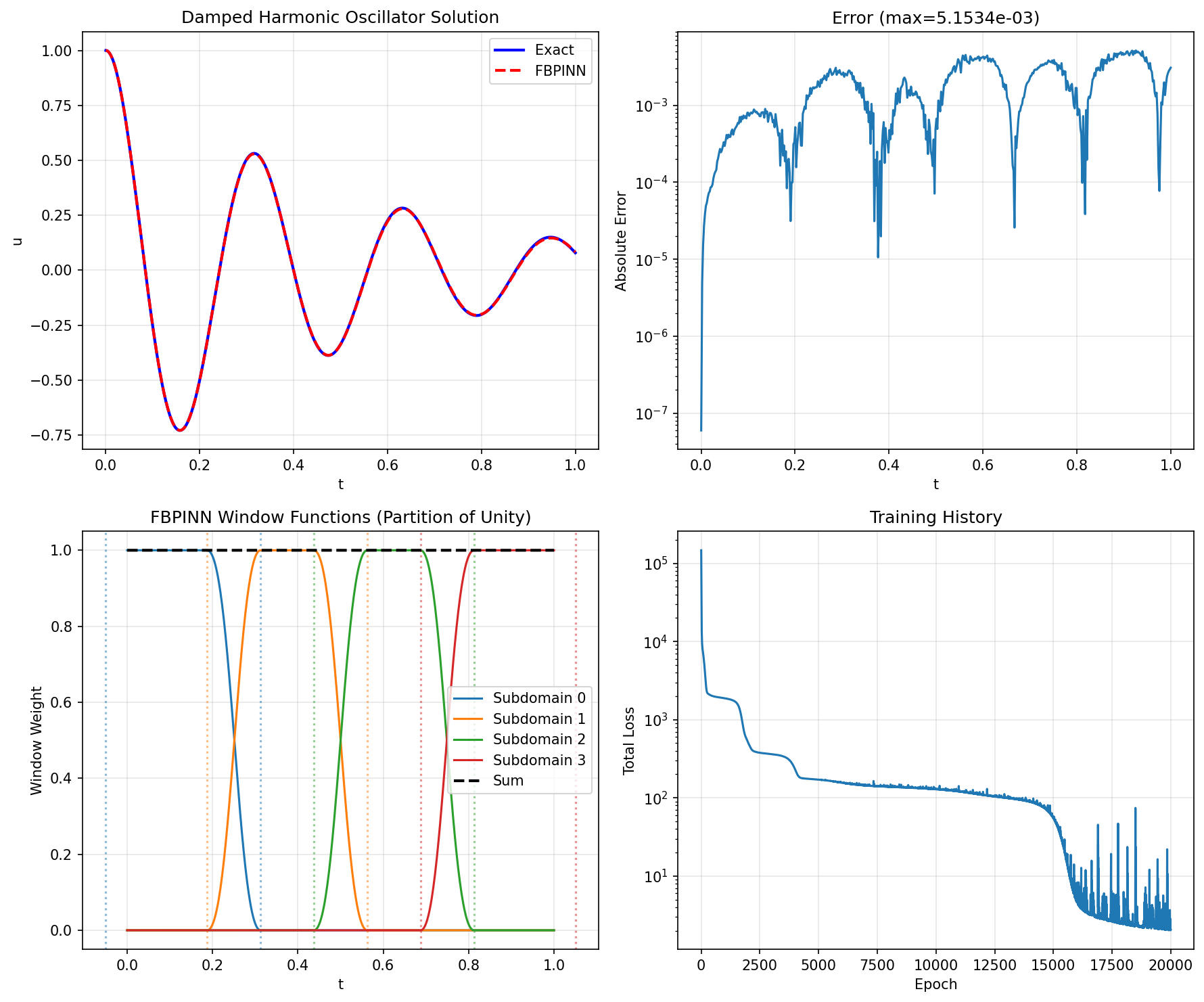
This example demonstrates solving the damped harmonic oscillator ODE using FBPINN (Finite Basis Physics-Informed Neural Network). FBPINNs decompose the domain into overlapping subdomains, with each subdomain having its own neural network. Smooth window functions create a partition of unity that blends the subdomain solutions.
This is the canonical FBPINN benchmark problem from Moseley et al. (2023). The hard boundary constraint approach ensures the initial conditions are exactly satisfied.
What You'll Learn¶
- Understand the FBPINN architecture with overlapping subdomains
- Implement hard boundary constraints via output transforms
- Configure window functions for partition of unity blending
- Subclass Opifex's FBPINN to add custom constraints
- Visualize window weights and subdomain contributions
Coming from FBPINNs (PyTorch)?¶
| FBPINNs (PyTorch) | Opifex (JAX) |
|---|---|
problems.HarmonicOscillator1DHardBC |
Subclass FBPINN with hard BC in __call__ |
constants.SUBDOMAIN_XS |
Subdomain(id=i, bounds=jnp.array([[t_lo, t_hi]])) |
WindowFunctions.COS_WINDOW |
FBPINNConfig(window_type="cosine") |
fbpinn.train() |
Custom training loop with nnx.Optimizer |
Key differences:
- Subclassing: Hard constraints implemented by subclassing FBPINN
- Explicit subdomains: Define subdomain bounds explicitly
- JIT compilation: Training loop is JIT-compiled for GPU efficiency
Files¶
- Python Script:
examples/domain-decomposition/fbpinn_poisson.py - Jupyter Notebook:
examples/domain-decomposition/fbpinn_poisson.ipynb
Quick Start¶
Run the Python Script¶
Run the Jupyter Notebook¶
Core Concepts¶
FBPINN Architecture¶
FBPINNs use a partition of unity approach:
where \(w_i(x)\) are smooth window functions and \(u_i(x)\) are subdomain networks.
| Component | This Example |
|---|---|
| Domain | \(t \in [0, 1]\) |
| Subdomains | 4 overlapping regions |
| Window | Cosine (smooth, compact support) |
| ODE | \(u'' + \mu u' + k u = 0\) |
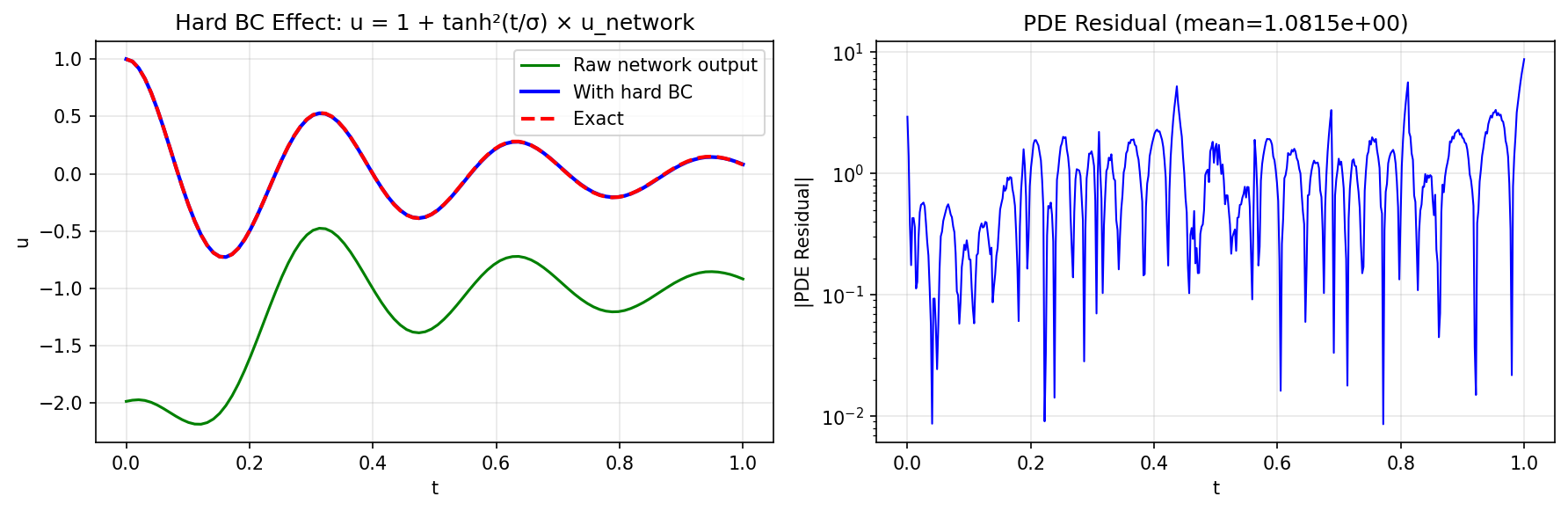
| Hard BC | \(u = 1 + \tanh^2(t/\sigma) \cdot u_{network}\) |
Damped Harmonic Oscillator¶
The ODE describes a damped oscillator with: - Damping coefficient: \(\mu = 4\) - Spring constant: \(k = 400\) - Initial conditions: \(u(0) = 1\), \(u'(0) = 0\)
Implementation¶
Step 1: Imports and Configuration¶
import jax
import jax.numpy as jnp
import optax
from flax import nnx
from opifex.neural.pinns.domain_decomposition import (
FBPINN,
FBPINNConfig,
Subdomain,
)
Terminal Output:
======================================================================
Opifex Example: FBPINN on Damped Harmonic Oscillator
======================================================================
JAX backend: gpu
JAX devices: [CudaDevice(id=0)]
Damped harmonic oscillator: u'' + 4.0*u' + 400.0*u = 0
Domain: t in [0.0, 1.0]
Subdomains: 4 (overlapping)
Hard BC: u = 1 + tanh(t/0.1)^2 * u_network
Network per subdomain: [1] + [32, 32] + [1]
Training: 20000 epochs @ lr=0.001
Step 2: Create FBPINN Subclass with Hard Constraint¶
class HarmonicOscillatorFBPINN(FBPINN):
"""FBPINN subclass with hard boundary constraint."""
def __init__(self, subdomains, interfaces, hidden_dims, *, sd=0.1, config=None, rngs):
super().__init__(
input_dim=1, output_dim=1,
subdomains=subdomains, interfaces=interfaces,
hidden_dims=hidden_dims, config=config, rngs=rngs,
)
self.sd = sd
def __call__(self, t):
"""Forward pass with hard BC: u = 1 + tanh(t/sd)^2 * u_network."""
u_network = super().__call__(t)
return 1.0 + jnp.tanh(t / self.sd) ** 2 * u_network
Terminal Output:
Creating FBPINN model...
Total FBPINN parameters: 4612
Parameters per subdomain: ~1153
Subdomain bounds:
Subdomain 0: [-0.050, 0.312]
Subdomain 1: [0.188, 0.562]
Subdomain 2: [0.438, 0.812]
Subdomain 3: [0.688, 1.050]
Step 3: Training¶
opt = nnx.Optimizer(model, optax.adam(LEARNING_RATE), wrt=nnx.Param)
@nnx.jit
def train_step(model, opt, t_dom):
def loss_fn(m):
return pde_loss(m, t_dom)
loss, grads = nnx.value_and_grad(loss_fn)(model)
opt.update(model, grads)
return loss
Terminal Output:
Training FBPINN...
Epoch 1/20000: loss=1.467470e+05
Epoch 4000/20000: loss=2.309863e+02
Epoch 8000/20000: loss=1.389566e+02
Epoch 12000/20000: loss=1.095311e+02
Epoch 16000/20000: loss=4.759035e+00
Epoch 20000/20000: loss=2.047876e+00
Final loss: 2.047876e+00
Step 4: Evaluation¶
Terminal Output:
Evaluating FBPINN...
Relative L2 error: 6.687945e-03
Maximum point error: 5.153432e-03
Mean point error: 1.909906e-03
Mean PDE residual: 1.081548e+00
u(0) predicted: 1.000000 (exact: 1.0, hard BC)
Visualization¶
Results Summary¶
| Metric | Value |
|---|---|
| Final Loss | 2.05 |
| Relative L2 Error | 0.67% |
| Maximum Error | 5.15e-03 |
| Mean PDE Residual | 1.08 |
| u(0) (hard BC) | 1.000000 |
| Parameters | 4,612 |
| Training Epochs | 20,000 |
| Window Sum | 1.0 (exact) |
Next Steps¶
Experiments to Try¶
- More subdomains: Try 8 or 16 subdomains for finer resolution
- Gaussian windows: Use
window_type="gaussian"instead of cosine - Higher frequency: Increase \(\omega_0\) for faster oscillations
- Different ODEs: Apply to heat equation or wave equation
Related Examples¶
| Example | Level | What You'll Learn |
|---|---|---|
| XPINN on Burgers | Intermediate | Non-overlapping subdomains |
| CPINN on Advection | Intermediate | Flux conservation |
| Heat Equation PINN | Beginner | Single-domain PINN |
API Reference¶
FBPINN: Base FBPINN class with window functionsFBPINNConfig: Configuration (window type, normalization)Subdomain: Subdomain definition with boundsCosineWindow,GaussianWindow: Window function implementations
Troubleshooting¶
| Issue | Solution |
|---|---|
| Window sum not 1.0 | Extend subdomain bounds beyond domain boundary |
| High loss | Increase epochs or adjust learning rate |
| Hard BC not exact | Check output transform formula matches IC |
| Slow training | Reduce number of collocation points |