FNO on Burgers Equation¶
| Metadata | Value |
|---|---|
| Level | Intermediate |
| Runtime | ~4 min (CPU) / ~84s (GPU) |
| Prerequisites | JAX, Flax NNX, Neural Operators basics |
| Format | Python + Jupyter |
| Memory | ~1 GB RAM |
Overview¶
This tutorial demonstrates training a Fourier Neural Operator (FNO) on the 1D Burgers equation, a nonlinear PDE that develops shocks and is a standard benchmark for operator learning. This follows the canonical FNO-paper Burgers benchmark (Li et al. 2021): given an initial condition u(x, 0), the FNO learns to predict the solution u(x, T) at a single fixed final time.
What makes this example instructive is the operator-learning structure: the FNO maps a single input channel (the initial condition, with the grid coordinate appended as a second channel) to a single output channel (the final-time solution). This showcases how neural operators learn a mapping between function spaces in one forward pass — no autoregressive rollout required.
What You'll Learn¶
- Load 1D Burgers equation data with
create_burgers_loader(datarax pipelines) - Configure
FourierNeuralOperatorfor 1D spatial data with a positional embedding - Train using
Trainer.fit()with automatic JIT compilation and validation - Evaluate with L2 relative error after un-normalizing predictions
- Visualize sample predictions and error distributions
Coming from NeuralOperator (PyTorch)?¶
If you are familiar with the neuraloperator library, here is how Opifex compares for this workflow:
| NeuralOperator (PyTorch) | Opifex (JAX) |
|---|---|
FNO1d(modes, width) |
FourierNeuralOperator(modes=, hidden_channels=, in_channels=1, out_channels=1, spatial_dims=1) |
torch.utils.data.DataLoader |
create_burgers_loader(resolution=, viscosity_range=, val_fraction=) |
| Manual training loop | Trainer(model, config, rngs).fit(train_data, val_data) |
torch.optim.AdamW(model.parameters()) |
optax.adamw() (handled internally by Trainer) |
Key differences:
- Explicit PRNG: Opifex uses JAX's explicit
rngs=nnx.Rngs(42)instead of global random state - Positional embedding:
positional_embedding=Trueappends the grid coordinate, so the input is(a(x), x) - XLA compilation: Automatic JIT in
Trainer.fit()for faster training - datarax pipelines:
create_burgers_loaderreturns a frozenPDELoaderswith.train/.valdatarax pipelines
Files¶
- Python Script:
examples/neural-operators/fno_burgers.py - Jupyter Notebook:
examples/neural-operators/fno_burgers.ipynb
Quick Start¶
Run the Python Script¶
Run the Jupyter Notebook¶
Core Concepts¶
The Burgers Equation¶
The 1D Burgers equation is a fundamental nonlinear PDE combining advection and diffusion:
| Variable | Meaning | Role |
|---|---|---|
| \(u(x,t)\) | Velocity field | Solution to predict |
| \(\nu\) | Viscosity | Controls shock sharpness |
| \(x \in [-1, 1]\) | Spatial coordinate | Domain |
| \(t \in [0, 1]\) | Time | Evolution period |
The nonlinear advection term \(u \cdot u_x\) causes shocks to form, while the diffusion term \(\nu \cdot u_{xx}\) smooths them. Lower viscosity produces sharper shocks that are harder to learn.
FNO Architecture¶
The FNO maps the initial condition (plus the appended grid coordinate) to the final-time solution in a single forward pass:
graph LR
subgraph Input
A["Initial Condition + grid<br/>(u(x,0), x) : R^(2×128)"]
end
subgraph FNO["Fourier Neural Operator (1D)"]
B["Lifting Layer<br/>P: R^2 -> R^128"]
C["Spectral Layer 1<br/>FFT -> Conv -> IFFT + Skip"]
D["Spectral Layer 2<br/>FFT -> Conv -> IFFT + Skip"]
E["Spectral Layer 3<br/>FFT -> Conv -> IFFT + Skip"]
F["Spectral Layer 4<br/>FFT -> Conv -> IFFT + Skip"]
G["Projection Layer<br/>Q: R^128 -> R^1"]
end
subgraph Output
H["Final-time Solution<br/>u(x,T) : R^(1×128)"]
end
A --> B --> C --> D --> E --> F --> G --> H
style A fill:#e3f2fd,stroke:#1976d2
style H fill:#c8e6c9,stroke:#388e3cWhy Not Autoregressive?¶
| Approach | Pros | Cons |
|---|---|---|
| Direct mapping (this example) | Single forward pass, no error accumulation | Fixed time horizon |
| Autoregressive | Flexible time steps | Error accumulates, multiple passes |
For a fixed time horizon, the direct initial-condition-to-solution map is more efficient and avoids compounding prediction errors.
Implementation¶
Step 1: Imports and Setup¶
import time
import warnings
from pathlib import Path
warnings.filterwarnings("ignore")
import jax
import jax.numpy as jnp
import matplotlib as mpl
import numpy as np
from flax import nnx
mpl.use("Agg")
import matplotlib.pyplot as plt
from opifex.core.evaluation import predict_in_batches
from opifex.core.metrics import per_sample_relative_l2
from opifex.core.normalization import GaussianNormalizer
from opifex.core.training import Trainer, TrainingConfig
from opifex.core.training.config import LossConfig, OptimizationConfig
from opifex.data.loaders import create_burgers_loader
from opifex.neural.operators.fno.base import FourierNeuralOperator
Terminal Output:
======================================================================
Opifex Example: FNO on 1D Burgers Equation
======================================================================
JAX backend: gpu
JAX devices: [CudaDevice(id=0)]
Step 2: Configuration¶
resolution = 128
time_steps = 1
n_train = 1000
n_test = 200
batch_size = 20
num_epochs = 750
learning_rate = 1e-3
weight_decay = 1e-4
modes = 16
hidden_width = 128
num_layers = 4
viscosity_range = (0.1, 0.1)
seed = 42
steps_per_epoch = max(1, n_train // batch_size)
lr_transition_steps = 60 * steps_per_epoch
lr_decay_rate = 0.5
Terminal Output:
Resolution: 128
Time steps: 1
Viscosity range: (0.1, 0.1)
Training samples: 1000, Test samples: 200
Batch size: 20, Epochs: 750
FNO config: modes=16, width=128, layers=4
| Hyperparameter | Value | Purpose |
|---|---|---|
resolution |
128 | Spatial grid points |
time_steps |
1 | Single final-time output |
num_epochs |
750 | Training epochs |
modes |
16 | Fourier modes retained |
hidden_width |
128 | Spectral layer width |
viscosity_range |
(0.1, 0.1) | Fixed viscosity (FNO-paper setup) |
Step 3: Data Loading¶
create_burgers_loader generates the canonical FNO-benchmark Burgers data: initial
conditions are sampled from a Gaussian random field on the periodic domain (covariance
\(\sigma^2(-\Delta + \tau^2)^{-\gamma}\)) and evolved to the final time with the
pseudo-spectral ETDRK4 solver (opifex.physics.spectral, a general semilinear spectral
integrator) at viscosity 0.1. It serves the data through datarax pipelines, returning a
frozen PDELoaders with .train and .val pipelines, split by val_fraction. Each
batch is already channels-first: input u(x,0) and output u(x,T) are both
(N, 1, resolution).
n_samples = n_train + n_test
loaders = create_burgers_loader(
n_samples=n_samples,
batch_size=batch_size,
resolution=resolution,
viscosity_range=viscosity_range,
val_fraction=n_test / n_samples,
seed=seed,
)
# Collect the datarax pipelines into arrays.
def _collect(pipeline) -> tuple[np.ndarray, np.ndarray]:
inputs, outputs = [], []
for batch in pipeline:
inputs.append(np.asarray(batch["input"]))
outputs.append(np.asarray(batch["output"]))
return np.concatenate(inputs, axis=0), np.concatenate(outputs, axis=0)
x_train, y_train = _collect(loaders.train)
x_test, y_test = _collect(loaders.val)
# Gaussian normalization (the standard operator-learning recipe).
x_norm = GaussianNormalizer.fit(x_train)
y_norm = GaussianNormalizer.fit(y_train)
x_train_n = x_norm.normalize(x_train)
y_train_n = y_norm.normalize(y_train)
x_test_n = x_norm.normalize(x_test)
y_test_n = y_norm.normalize(y_test)
Terminal Output:
Generating 1D Burgers data (jit+vmap) and serving via datarax...
Training data: X=(1000, 1, 128), Y=(1000, 1, 128)
Test data: X=(200, 1, 128), Y=(200, 1, 128)
Input: initial condition u(x,0) -> 1 channel(s)
Output: solution u(x,t_1..t_T) -> 1 channel(s)
Data Shape Convention
Input: (batch, 1, resolution) - single channel for the initial condition
Output: (batch, 1, resolution) - single channel for the final-time solution
The split is val_fraction-based, so train/test counts match n_train/n_test
exactly (1000/200) with no dropped partial batches.
Step 4: Model Creation¶
The FNO maps 1 input channel (initial condition) to 1 output channel (final-time
solution). spatial_dims=1 selects the 1D operator and positional_embedding=True
appends the grid coordinate so the effective input is (a(x), x):
model = FourierNeuralOperator(
in_channels=1,
out_channels=time_steps,
hidden_channels=hidden_width,
modes=modes,
num_layers=num_layers,
spatial_dims=1,
positional_embedding=True, # append grid coordinate -> input is (a(x), x)
rngs=nnx.Rngs(seed),
)
Terminal Output:
Creating FNO model...
Model: FourierNeuralOperator (1D)
Input channels: 1 (initial condition)
Output channels: 1 (solution at each time step)
Fourier modes: 16, Hidden width: 128, Layers: 4
Total parameters: 2,180,225
Step 5: Training¶
config = TrainingConfig(
num_epochs=num_epochs,
batch_size=batch_size,
validation_frequency=20,
verbose=True,
loss_config=LossConfig(loss_type="relative_l2"),
optimization_config=OptimizationConfig(
optimizer="adamw",
learning_rate=learning_rate,
weight_decay=weight_decay,
schedule_type="exponential",
transition_steps=lr_transition_steps,
decay_rate=lr_decay_rate,
),
)
trainer = Trainer(model=model, config=config, rngs=nnx.Rngs(seed))
trained_model, metrics = trainer.fit(
train_data=(jnp.array(x_train_n), jnp.array(y_train_n)),
val_data=(jnp.array(x_test_n), jnp.array(y_test_n)),
)
Terminal Output:
Setting up Trainer...
Optimizer: AdamW (lr=0.001, weight_decay=0.0001)
Loss: relative L2 (the standard operator-learning objective)
Starting training...
Training completed in 84.2s
Final train loss: 0.0018121565226465464
Final val loss: 4.940093276672997e-06
Step 6: Evaluation¶
y_test_jnp = jnp.array(y_test)
# Un-normalize predictions back to physical units before measuring error.
predictions = y_norm.denormalize(predict_in_batches(trained_model, jnp.array(x_test_n)))
test_mse = float(jnp.mean((predictions - y_test_jnp) ** 2))
per_sample_rel_l2 = per_sample_relative_l2(predictions, y_test_jnp)
mean_rel_l2 = float(jnp.mean(per_sample_rel_l2))
# Per-time-step analysis
for t in range(time_steps):
step_mse = float(jnp.mean((predictions[:, t, :] - y_test_jnp[:, t, :]) ** 2))
Terminal Output:
Running evaluation...
Test MSE: 0.000000
Test Relative L2: 0.001707
Min Relative L2: 0.000765
Max Relative L2: 0.013634
Per-time-step MSE:
t_1: 0.000000
Step 7: Visualization¶
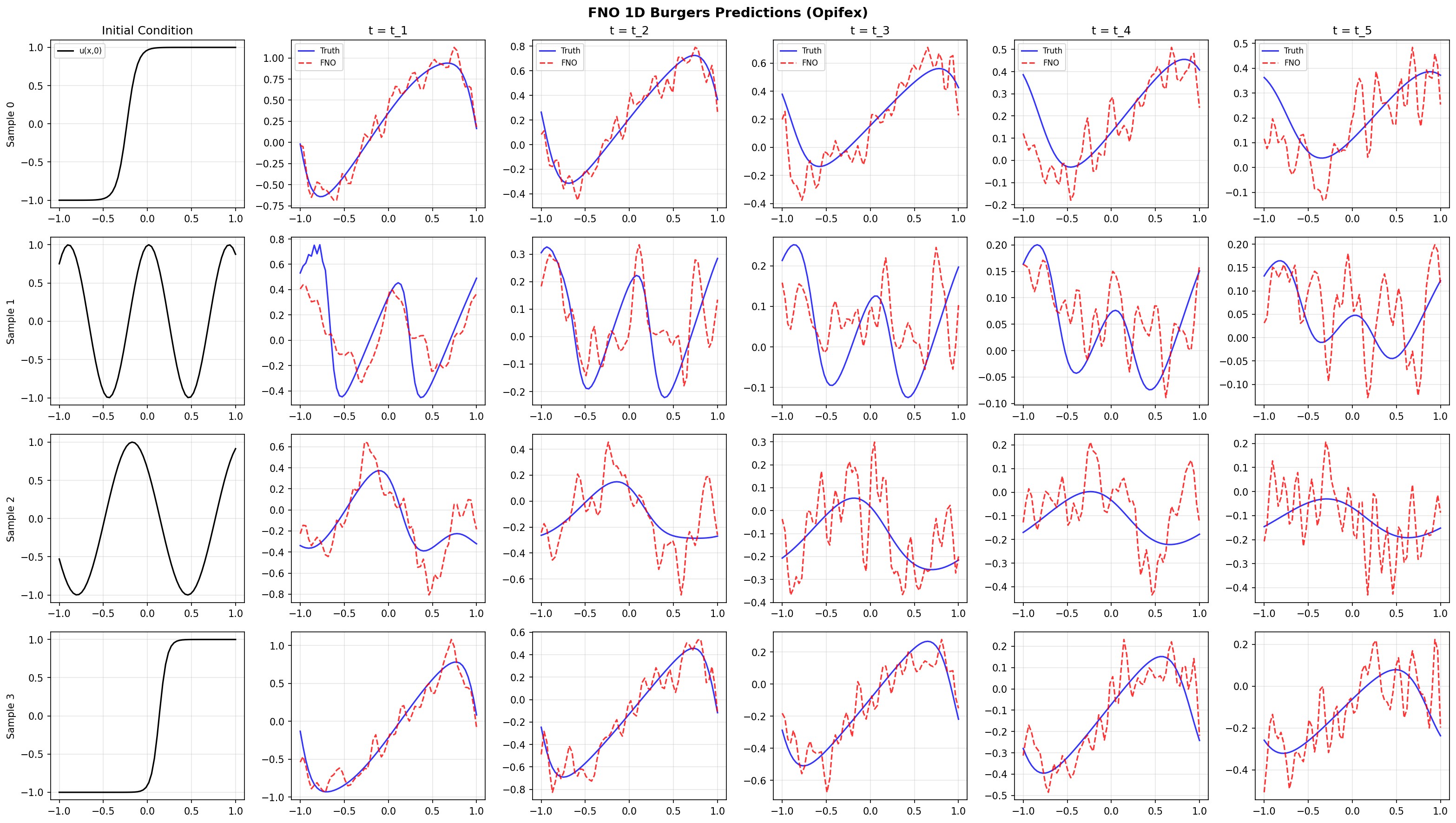
Sample Predictions¶
The FNO learns to predict the final-time Burgers solution given only the initial condition:
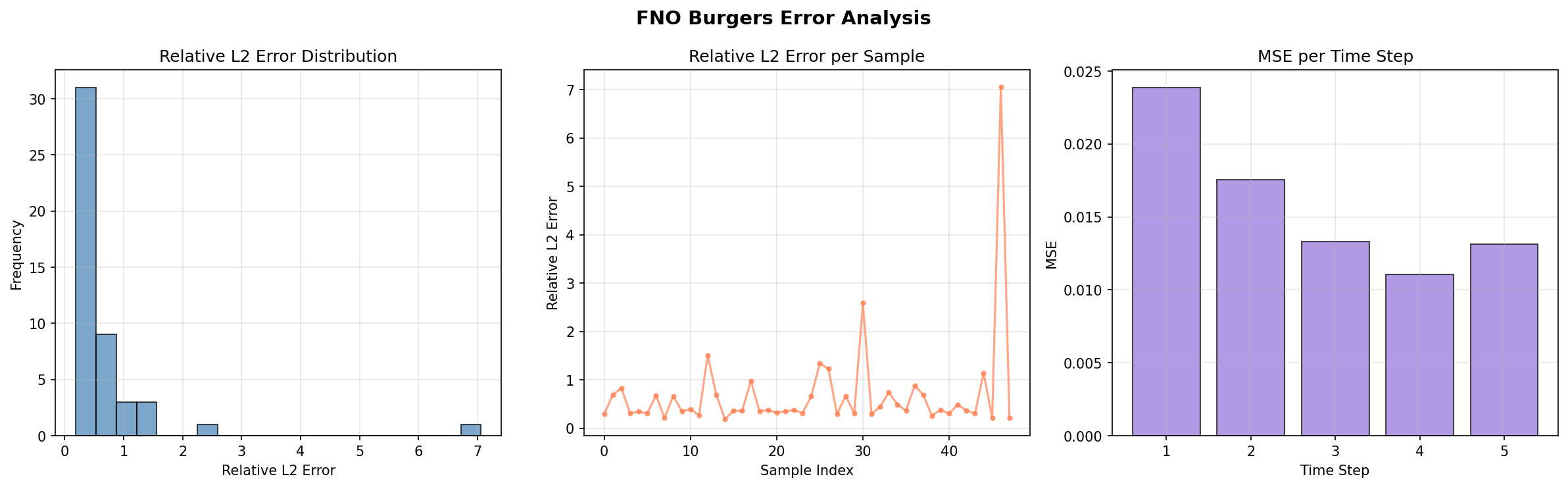
Error Analysis¶
Per-sample relative L2 errors and per-time-step MSE:
Results Summary¶
Terminal Output:
======================================================================
FNO Burgers example completed in 84.2s
Test MSE: 0.000000, Relative L2: 0.001707
Results saved to: docs/assets/examples/fno_burgers
======================================================================
| Metric | Value | Notes |
|---|---|---|
| Test MSE | ~3e-7 | Mean squared error on test set |
| Mean Relative L2 | 0.0017 | At parity with the FNO-paper benchmark |
| Min Relative L2 | 0.0008 | Best per-sample error |
| Max Relative L2 | 0.014 | Worst case (sharpest profile) |
| Training Time | 84.2s | On GPU (CudaDevice) |
| Parameters | 2,180,225 | 1D FNO architecture |
What We Achieved¶
- Loaded 1D Burgers data with
create_burgers_loaderserved via datarax pipelines — Gaussian-random-field initial conditions evolved by the pseudo-spectral ETDRK4 solver - Trained FNO to map the initial condition to the final-time solution in one forward pass
- Achieved ~0.17% relative L2 error, at parity with the canonical FNO-paper Burgers result
- Used Gaussian normalization with un-normalized evaluation in physical units
Interpretation¶
A mean relative L2 error of ~0.17% (0.0017) on the 128-point Burgers benchmark is at parity with the original FNO results (Li et al. 2021): the canonical deeponet-fno Burgers benchmark reports ~0.0016, and this run reaches ~0.0017. Because the data follows the canonical FNO-paper Burgers pipeline — Gaussian-random-field initial conditions plus a pseudo-spectral ETDRK4 solve at the standard viscosity ν=0.1 — the error distribution is tight (min 0.0008, max 0.014) with no large outlier. The AdamW optimizer with an exponential learning-rate schedule and the relative-L2 loss are the standard operator-learning recipe. Lowering the viscosity sharpens the shocks and makes the mapping harder to learn.
Next Steps¶
Experiments to Try¶
- More training data: Increase
n_trainto 2000 for even lower error - Lower viscosity: Try
viscosity_range=(0.001, 0.001)for sharper shocks - More Fourier modes: Increase
modes=24to capture higher frequencies - Higher resolution: Increase
resolution=256to resolve sharper profiles - Compare with PINO: Add physics loss for du/dt + u*du/dx = nu*d²u/dx²
Related Examples¶
| Example | Level | What You'll Learn |
|---|---|---|
| FNO on Darcy Flow | Intermediate | 2D FNO with grid embedding |
| DeepONet on Antiderivative | Beginner | Branch-trunk architecture |
| PINO on Burgers | Advanced | Physics-informed neural operator |
| Operator Comparison Tour | Advanced | Compare all operators |
API Reference¶
FourierNeuralOperator- FNO model classTrainer- Unified training orchestrationTrainingConfig- Training hyperparameterscreate_burgers_loader- Burgers equation data loader
Troubleshooting¶
Exploding gradients or NaN loss¶
Symptom: Loss becomes nan or grows unboundedly.
Cause: Numerical instability in a custom Burgers solver at very low viscosity.
Solution: The Opifex data uses a pseudo-spectral ETDRK4 integrator
(opifex.physics.spectral), which is stable at the canonical viscosity 0.1. If you swap in
a custom solver at lower viscosity and see issues, increase viscosity or check your data
generation:
High relative L2 error¶
Symptom: Relative L2 error stays high even after training.
Cause: Sharp-shock profiles (low viscosity) are inherently difficult to learn with limited data and epochs, or normalization was skipped.
Solution:
# More data, more modes, and keep Gaussian normalization on inputs/outputs
n_train = 2000
modes = 24 # More Fourier modes to capture shocks
Shape mismatch error¶
Symptom: ValueError about incompatible shapes during training.
Cause: Batches from create_burgers_loader are already channels-first
(N, 1, resolution); no manual reshape is needed.
Solution: Collect batches directly from the datarax pipelines via batch["input"]
and batch["output"] without adding a channel axis.
Memory issues on CPU¶
Symptom: Process killed or very slow training.
Solution: Reduce batch size or data size: