DISCO Convolutions: Discretisation-Invariant Convolution on Arbitrary Point Sets¶
| Metadata | Value |
|---|---|
| Level | Advanced |
| Runtime | ~30 s (GPU) / ~2 min (CPU) |
| Prerequisites | JAX, Flax NNX, neural operators, quadrature basics |
| Format | Python + Jupyter |
| Memory | ~0.5 GB |
Overview¶
A standard convolution has a fixed pixel kernel: its receptive field shrinks as the grid refines,
and it cannot be applied to non-grid (scattered) data at all. A discrete-continuous (DISCO)
convolution (Ocampo, Price & McEwen 2023, arXiv:2209.13603 — the
algorithm behind NVIDIA's torch_harmonics and spherical neural operators) instead parameterises
the kernel as a continuous function kappa(r) = Σ_k w_k φ_k(r) and evaluates the convolution as a
quadrature against the input samples:
Because the kernel lives in physical coordinates (not pixels) and the sum is a quadrature, the operator is discretisation-aware: the same learned kernel transfers across grid resolutions, and it works on irregular point sets. This example demonstrates both with measurements.
The radial basis reuses opifex's PiecewiseLinearBasis (the torch_harmonics
filter basis), and the filter is normalised per output point (a partition of unity) as in the
reference.
What You'll Learn¶
- Build a
DiscreteContinuousConv2dover arbitrary input/output point sets - Measure discretisation invariance: the same kernel on a finer grid gives a consistent result
- Apply the same operator to an irregular (scattered) point cloud — impossible for a pixel conv
Files¶
- Python Script:
examples/layers/disco_convolutions_example.py - Jupyter Notebook:
examples/layers/disco_convolutions_example.ipynb
Quick Start¶
Coming from neuraloperator / torch_harmonics?¶
| neuraloperator / torch_harmonics | Opifex |
|---|---|
DiscreteContinuousConv2d(in_channels, out_channels, grid_in, grid_out, quadrature_weights, kernel_shape) |
DiscreteContinuousConv2d(in_channels, out_channels, in_coords, out_coords, quad_weights, num_basis=, radius=, rngs=) |
PiecewiseLinearFilterBasis |
opifex.neural.equivariant.PiecewiseLinearBasis |
The geometry (input/output positions and quadrature weights) is fixed at construction so the normalised filter is precomputed once; the learnable parameters are the per-basis channel-mixing weights, independent of the geometry — which is exactly what lets the same kernel transfer to a new grid.
Core Concept¶
The convolution factorises into a fixed geometric filter and learnable channel weights:
out[b, o, d] = Σ_{i, k} psi[o, i, k] · x[b, i, c] · weight[k, c, d]
└── geometry ──┘ └── learned ──┘
psi[o, i, k] = q_i · φ_k(|x_o − x_i|), normalised so Σ_i psi[o, i, k] = 1
φ_k are the piecewise-linear radial hats; q_i are quadrature weights (the measure each sample
represents). The per-output normalisation (torch_harmonics's _normalize_convolution_filter_matrix)
is the partition of unity that gives consistent magnitude across discretisations.
Results¶
1. Discretisation invariance (convergence)¶
The same continuous kernel is applied to a smooth field sampled on grids of increasing resolution, read out at a fixed set of query points. The output converges as the grid refines:
Terminal Output:
Discretisation invariance (same continuous kernel, refining the input grid):
------------------------------------------------------------------------
output @ query points (24x24): [-0.0824 -0.0115 -0.0501 0.0297 0.0907]
output @ query points (96x96): [-0.0791 -0.0115 -0.0506 0.0336 0.0813]
relative change 24->96: 0.0826
relative change 48->96: 0.0112 (halves as the grid refines: convergent)
The relative change drops from 0.083 (24×24 vs 96×96) to 0.011 (48×48 vs 96×96) — roughly a 7× reduction as the grid refines toward the continuum. A standard pixel convolution has no such guarantee: its kernel is tied to the grid spacing, so refining the grid changes the operator.
2. Irregular (scattered) point set¶
Irregular (scattered) point set:
------------------------------------------------------------------------
500 scattered points, same kernel -> output [-0.0819 -0.0176 -0.0826 0.0094 0.1003]
agreement with the 96x96 grid result: relative diff 0.3479
(a standard pixel convolution cannot be applied to scattered points at all)
The same operator runs directly on 500 randomly scattered points using Monte-Carlo quadrature
weights — something a pixel convolution cannot do at all. The result approximates the grid
convolution (relative diff 0.35 with only 500 random points; Monte-Carlo quadrature converges as
1/sqrt(N), so more points or a proper quadrature rule tighten the agreement).
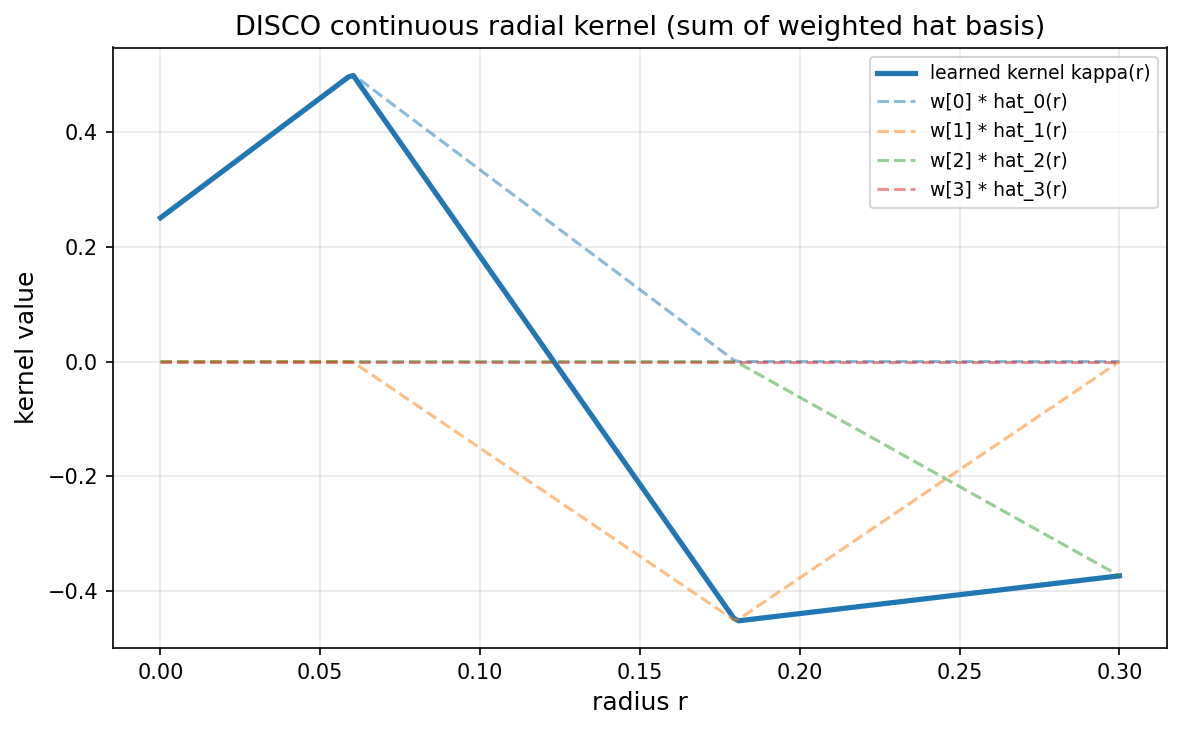
3. The learned continuous kernel¶
The kernel is a weighted sum of piecewise-linear radial hat functions — a genuinely continuous profile, not a pixel stencil:
Results Summary¶
| Property | Measurement | What it shows |
|---|---|---|
| Discretisation invariance | rel. change 0.083 (24→96) → 0.011 (48→96) | Same kernel converges as grid refines |
| Irregular-grid capability | 500 scattered points, rel. diff 0.35 vs grid | Runs on non-grid data (pixel conv cannot) |
| Continuous kernel | Σ_k w_k φ_k(r) over 4 hat bases |
Kernel in physical coords, not pixels |
Next Steps¶
Experiments to Try¶
- Increase the scattered-point count and watch the irregular-grid agreement improve (
1/sqrt(N)). - Vary
num_basisandradiusto trade kernel expressivity against support. - Stack
DiscreteContinuousConv2dlayers into an encoder on an irregular mesh.
Related Examples¶
| Example | Level | What You'll Learn |
|---|---|---|
| Grid Embeddings | Beginner | Spatial coordinate injection for neural operators |
| Spectral Normalization | Intermediate | Lipschitz control for stable deep operators |
| Fourier Continuation | Intermediate | Boundary handling for spectral methods |
API Reference¶
DiscreteContinuousConv2d— general DISCO convolution layerbuild_disco_filter— the normalised quadrature filterpsi[o, i, k]regular_grid— uniform grid coordinates and quadrature weightsPiecewiseLinearBasis— the continuous radial basis